diff --git a/docs/how_to/detect_and_annotate.md b/docs/how_to/detect_and_annotate.md
index b88e36a54..18739b283 100644
--- a/docs/how_to/detect_and_annotate.md
+++ b/docs/how_to/detect_and_annotate.md
@@ -1,5 +1,6 @@
---
comments: true
+status: new
---
# Detect and Annotate
diff --git a/docs/how_to/detect_small_objects.md b/docs/how_to/detect_small_objects.md
new file mode 100644
index 000000000..ebd6c0968
--- /dev/null
+++ b/docs/how_to/detect_small_objects.md
@@ -0,0 +1,262 @@
+---
+comments: true
+status: new
+---
+
+# Detect Small Objects
+
+This guide shows how to detect small objects
+with the [Inference](https://github.com/roboflow/inference),
+[Ultralytics](https://github.com/ultralytics/ultralytics) or
+[Transformers](https://github.com/huggingface/transformers) packages using
+[`InferenceSlicer`](detection/tools/inference_slicer/#supervision.detection.tools.inference_slicer.InferenceSlicer).
+
+
+
+## Baseline Detection
+
+Small object detection in high-resolution images presents challenges due to the objects'
+size relative to the image resolution.
+
+=== "Inference"
+
+ ```python
+ import cv2
+ import supervision as sv
+ from inference import get_model
+
+ model = get_model(model_id="yolov8x-640")
+ image = cv2.imread()
+ results = model.infer(image)[0]
+ detections = sv.Detections.from_inference(results)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections)
+ ```
+
+=== "Ultralytics"
+
+ ```python
+ import cv2
+ import supervision as sv
+ from ultralytics import YOLO
+
+ model = YOLO("yolov8x.pt")
+ image = cv2.imread()
+ results = model(image)[0]
+ detections = sv.Detections.from_ultralytics(results)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections)
+ ```
+
+=== "Transformers"
+
+ ```python
+ import torch
+ import supervision as sv
+ from PIL import Image
+ from transformers import DetrImageProcessor, DetrForObjectDetection
+
+ processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50")
+ model = DetrForObjectDetection.from_pretrained("facebook/detr-resnet-50")
+
+ image = Image.open()
+ inputs = processor(images=image, return_tensors="pt")
+
+ with torch.no_grad():
+ outputs = model(**inputs)
+
+ width, height = image.size
+ target_size = torch.tensor([[height, width]])
+ results = processor.post_process_object_detection(
+ outputs=outputs, target_sizes=target_size)[0]
+ detections = sv.Detections.from_transformers(results)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ labels = [
+ model.config.id2label[class_id]
+ for class_id
+ in detections.class_id
+ ]
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections, labels=labels)
+ ```
+
+
+
+## Input Resolution
+
+Modifying the input resolution of images before detection can enhance small object
+identification at the cost of processing speed and increased memory usage. This method
+is less effective for ultra-high-resolution images (4K and above).
+
+=== "Inference"
+
+ ```{ .py hl_lines="5" }
+ import cv2
+ import supervision as sv
+ from inference import get_model
+
+ model = get_model(model_id="yolov8x-1280")
+ image = cv2.imread()
+ results = model.infer(image)[0]
+ detections = sv.Detections.from_inference(results)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections)
+ ```
+
+=== "Ultralytics"
+
+ ```{ .py hl_lines="7" }
+ import cv2
+ import supervision as sv
+ from ultralytics import YOLO
+
+ model = YOLO("yolov8x.pt")
+ image = cv2.imread()
+ results = model(image, imgsz=1280)[0]
+ detections = sv.Detections.from_ultralytics(results)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections)
+ ```
+
+
+
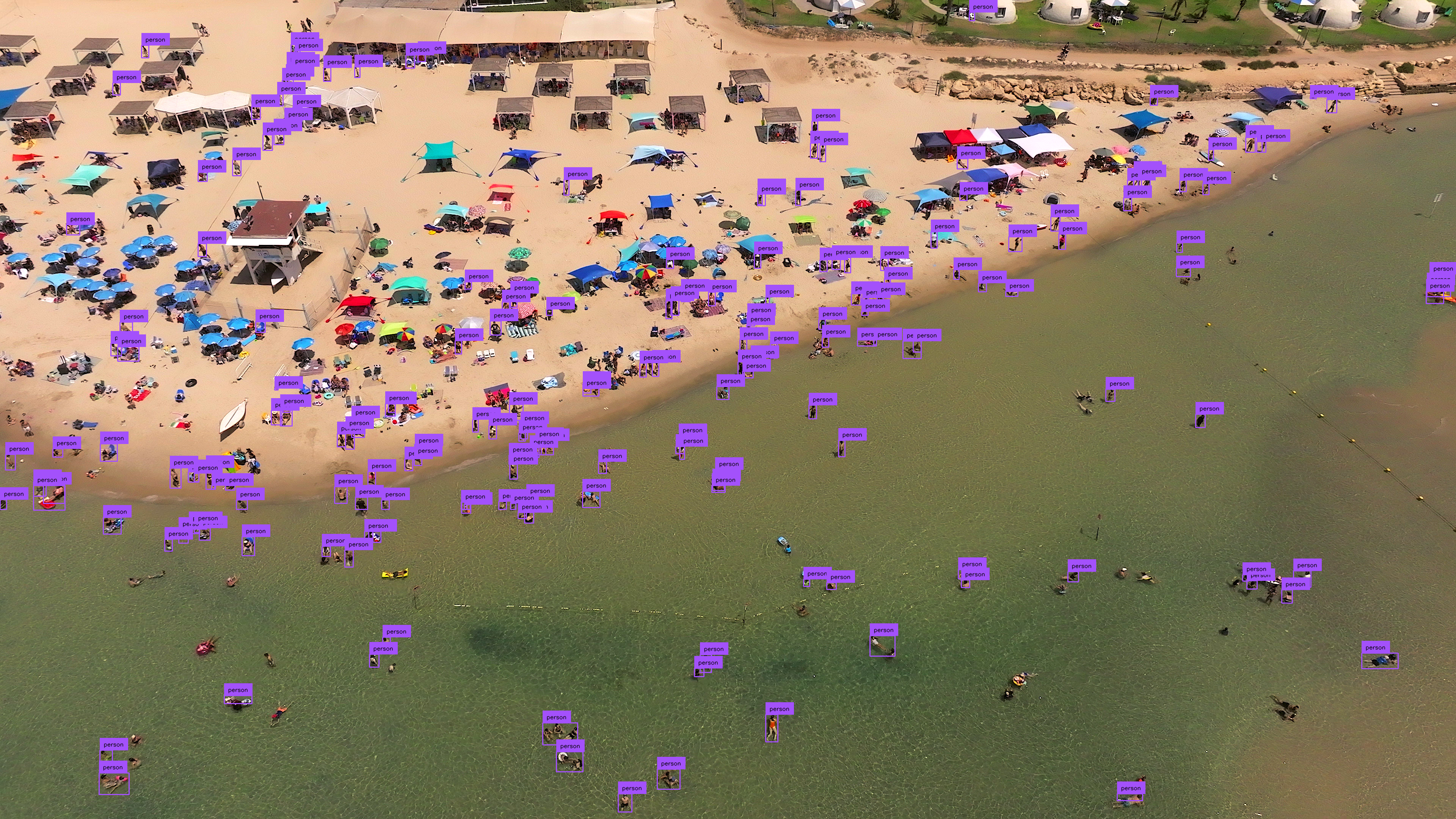
+## Inference Slicer
+
+[`InferenceSlicer`](detection/tools/inference_slicer/#supervision.detection.tools.inference_slicer.InferenceSlicer)
+processes high-resolution images by dividing them into smaller segments, detecting
+objects within each, and aggregating the results.
+
+=== "Inference"
+
+ ```{ .py hl_lines="9-14" }
+ import cv2
+ import numpy as np
+ import supervision as sv
+ from inference import get_model
+
+ model = get_model(model_id="yolov8x-640")
+ image = cv2.imread()
+
+ def callback(image_slice: np.ndarray) -> sv.Detections:
+ results = model.infer(image_slice)[0]
+ detections = sv.Detections.from_inference(results)
+
+ slicer = sv.InferenceSlicer(callback = callback)
+ detections = slicer(image)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections)
+ ```
+
+=== "Ultralytics"
+
+ ```{ .py hl_lines="9-14" }
+ import cv2
+ import numpy as np
+ import supervision as sv
+ from ultralytics import YOLO
+
+ model = YOLO("yolov8x.pt")
+ image = cv2.imread()
+
+ def callback(image_slice: np.ndarray) -> sv.Detections:
+ result = model(image_slice)[0]
+ return sv.Detections.from_ultralytics(result)
+
+ slicer = sv.InferenceSlicer(callback = callback)
+ detections = slicer(image)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections)
+ ```
+
+=== "Transformers"
+
+ ```{ .py hl_lines="13-28" }
+ import cv2
+ import torch
+ import numpy as np
+ import supervision as sv
+ from PIL import Image
+ from transformers import DetrImageProcessor, DetrForObjectDetection
+
+ processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50")
+ model = DetrForObjectDetection.from_pretrained("facebook/detr-resnet-50")
+
+ image = cv2.imread()
+
+ def callback(image_slice: np.ndarray) -> sv.Detections:
+ image_slice = cv2.cvtColor(image_slice, cv2.COLOR_BGR2RGB)
+ image_slice = Image.fromarray(image_slice)
+ inputs = processor(images=image_slice, return_tensors="pt")
+
+ with torch.no_grad():
+ outputs = model(**inputs)
+
+ width, height = image.size
+ target_size = torch.tensor([[height, width]])
+ results = processor.post_process_object_detection(
+ outputs=outputs, target_sizes=target_size)[0]
+ return sv.Detections.from_transformers(results)
+
+ slicer = sv.InferenceSlicer(callback = callback)
+ detections = slicer(image)
+
+ bounding_box_annotator = sv.BoundingBoxAnnotator()
+ label_annotator = sv.LabelAnnotator()
+
+ labels = [
+ model.config.id2label[class_id]
+ for class_id
+ in detections.class_id
+ ]
+
+ annotated_image = bounding_box_annotator.annotate(
+ scene=image, detections=detections)
+ annotated_image = label_annotator.annotate(
+ scene=annotated_image, detections=detections, labels=labels)
+ ```
+
+
diff --git a/docs/index.md b/docs/index.md
index 7e4733fe9..6846acb1c 100644
--- a/docs/index.md
+++ b/docs/index.md
@@ -109,6 +109,14 @@ You can install `supervision` with pip in a
[:octicons-arrow-right-24: Tutorial](how_to/track_objects.md)
+- __Detect Small Objects__
+
+ ---
+
+ Learn how to detect small objects in images
+
+ [:octicons-arrow-right-24: Tutorial](how_to/detect_small_objects.md)
+
- > __Count Objects Crossing Line__
---
diff --git a/mkdocs.yml b/mkdocs.yml
index 5444290b9..d325eb658 100644
--- a/mkdocs.yml
+++ b/mkdocs.yml
@@ -38,6 +38,7 @@ nav:
- Home: index.md
- How to:
- Detect and Annotate: how_to/detect_and_annotate.md
+ - Detect Small Objects: how_to/detect_small_objects.md
- Track Objects: how_to/track_objects.md
- Filter Detections: how_to/filter_detections.md
- API: