Robot-specific configuration and launch-files to use giskard controllers on the Boxy robot.
Using catkin_tools and wstool in a new workspace, please run:
source /opt/ros/indigo/setup.bash # start using ROS Indigo
mkdir -p ~/giskard_ws/src # create directory for workspace
cd ~/giskard_ws # go to workspace directory
catkin init # init workspace
cd src # go to source directory of workspace
wstool init # init rosinstall
wstool merge https://raw.githubusercontent.com/SemRoCo/giskard_boxy/master/rosinstall/catkin_indigo.rosinstall
# update rosinstall file
wstool update # pull source repositories
rosdep install --ignore-src --from-paths . # install dependencies available through apt
cd .. # go to workspace directory
catkin build # build packages
source ~/giskard_ws/devel/setup.bash # source new overlay
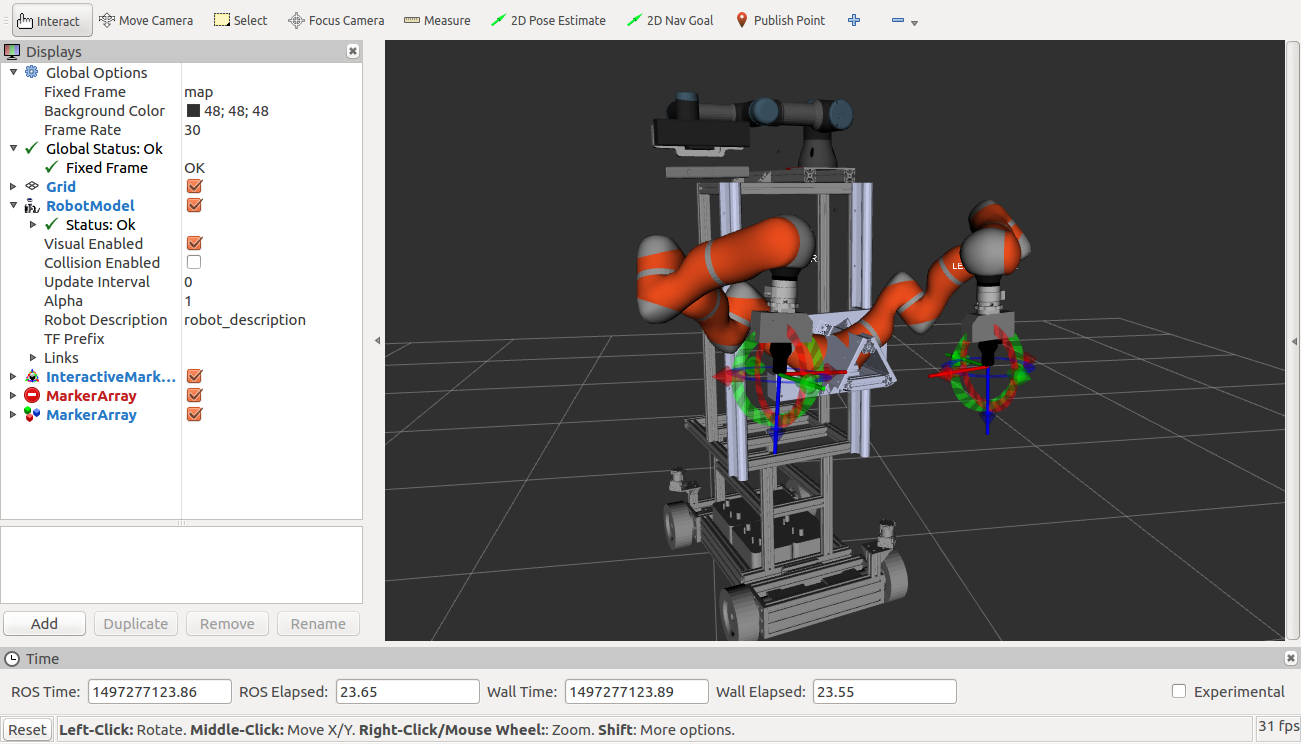
To get a quick intuition of the performance of the upper-body Cartesian control, you can run
roslaunch giskard_boxy interactive_markers.launch sim:=trueThat should bring up a kinematics-only simulation of Boxy, the giskard controller, and rviz with interactive markers displayed. Pull on the markers to move the left or the right arm, respectively.