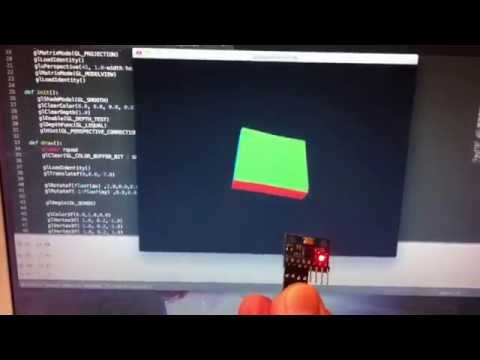
Playing around with a 6DOF IMU (MPU-6050), Arduino, Python and OpenGL
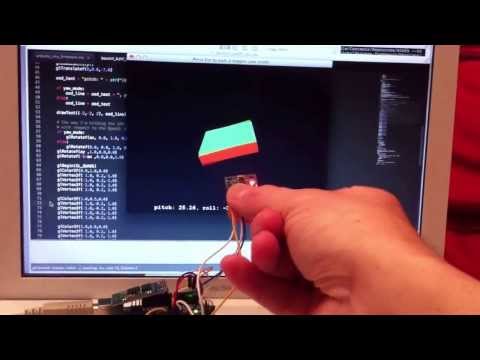
The Arduino Uno is sending pitch and roll data via bluetooth. A python script is receiving the data and displaying a little cube accordingly. The IMU data consists of gyro and accelerometer data, processed by a complementary filter.
- PyOpenGL
- Pygame
- pySerial
- connect Arduion with MPU-6050 (connection diagram can be found at https://bit.ly/2VqX6p5)
- Connect the Arduino MPU-6050 bundle to PC
- In Arduino IDE, uploading arduino_imu_firmware.ino
- In any Python IDE, run boxctrl_6d0f_imu.py
You need:
- MPU6050 6DOF Sensor Module "GY-521" for 3,89EUR (ebay, sent from China) Nice one. LDO regulator on board, takes 5V.
- Data Sheet / Register Map http://invensense.com/mems/gyro/documents/RM-MPU-6000A.pdf
- ArduinoBoard - Gotta love 'em
This was one of my first experiments. I only used the accelerometer. The reaction is very jerky and not precise at all.
Additionally using the gyros and mixing accelerometer and gyro data with a complementary filter improved precision, smoothness and response sensitivity a lot. As an option I also added yaw data from the gyro but that data is not filtered hence the error accumulates up pretty quickly.
This is about 10 years old stuff - Here's the wayback link to my discontinued wiki: http://web.archive.org/web/20190626080855/http://mattzz.no-ip.org/wiki/Projects/PlayingWithInertialMeasurementUnits