![]()
A fast path planner for grids.
var ndarray = require('ndarray')
var createPlanner = require('l1-path-finder')
//Create a maze as an ndarray
var maze = ndarray([
0, 1, 0, 0, 0, 0, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 1, 1, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 0, 0, 0,
0, 1, 0, 1, 0, 1, 1,
0, 0, 0, 1, 0, 0, 0,
], [8, 7])
//Create path planner
var planner = createPlanner(maze)
//Find path
var path = []
var dist = planner.search(0,0, 7,6, path)
//Log output
console.log('path length=', dist)
console.log('path = ', path)Output:
path length= 31
path = [ 0, 0, 7, 0, 7, 2, 0, 2, 0, 4, 1, 4, 1, 6, 3, 6, 5, 6, 5, 4, 7, 4, 7, 6 ]
This module works in any node-flavored CommonJS environment, including node.js, iojs and browserify. You can install it using the npm package manager with the following command:
npm i l1-path-finder
The input to the library is in the form of an ndarray. For more information on this data type, check out the SciJS project.
var createPlanner = require('l1-path-finder')The default method from the package is a constructor which creates a path planner.
gridis a 2D ndarray.0orfalse-y values correspond to empty cells and non-zero ortrue-thy values correspond to impassable obstacles
Returns A new planner object which you can use to answer queries about the path.
Time Complexity O(grid.shape[0]*grid.shape[1] + n log(n)) where n is the number of concave corners in the grid.
Space Complexity O(n sqrt(log(n)))
Executes a path search on the grid.
srcX, srcYare the coordinates of the start of the path (source)dstX, dstYare the coordiantes of the end of the path (target)pathis an optional array which receives the result of the path
Returns The distance from the source to the target
Time Complexity Worst case O(n sqrt(log(n)³) ), but in practice much less usually
l1-path-finder is probably the fastest JavaScript library for finding paths on uniform cost grids. Here is a chart showing some typical comparisons (log-scale):
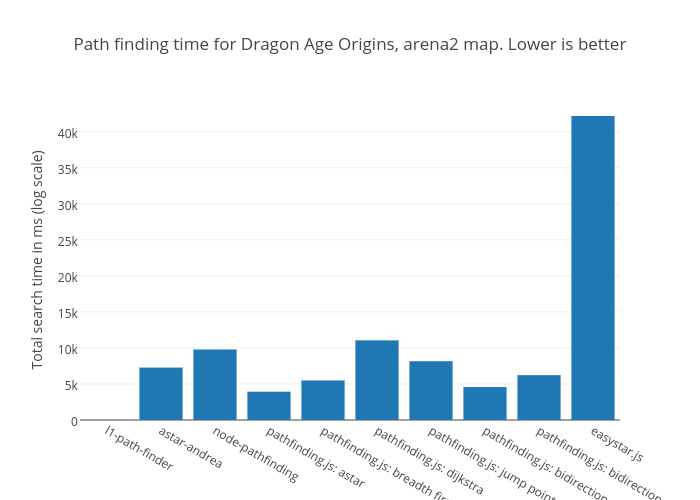
You can try out some of the benchmarks in your browser here, or you can run them locally by cloning this repo. Data is taken from the grid path planning challenge benchmark.
It is also pretty competitive with C++ libraries for path searching. The following chart shows the performance of l1-path-finder compared to Warthog, which is a state of the art implementation of the popular "jump point search" algorithm:

- The algorithm implemented in this module is based on the following result by Clarkson et al:
- K. Clarkson, S. Kapoor, P. Vaidya. (1987) "Rectilinear shortest paths through polygonal obstacles in O(n log(n)²) time" SoCG 87
- This data structure is asymptotically faster than naive grid based algorithms like Jump Point Search or simple A*/Dijkstra based searches.
- All memory is preallocated. At run time, searches trigger no garbage collection or other memory allocations.
- The heap data structure used in this implementation is a pairing heap based on the following paper:
- G. Navarro, R. Paredes. (2010) "On sorting, heaps, and minimum spanning trees" Algorithmica
- Box stabbing queries are implemented using rank queries.
- The graph search uses landmarks to speed up A*, based on the technique in the following paper:
- A. Goldberg, C. Harrelson. (2004) "Computing the shortest path: A* search meets graph theory" Microsoft Research Tech Report
- For more information on A* searching, check out Amit Patel's pages
(c) 2015 Mikola Lysenko. MIT License