General-purpose Linux distributions require special setup for real-time applications. If installed on general-purpose hardware, some aspects may be also tuned. See Configuring the system for RoboPLC.
Furthermore, the applications can behave differently on different CPU cores due to IRQs or little-big architecture peculiarities.
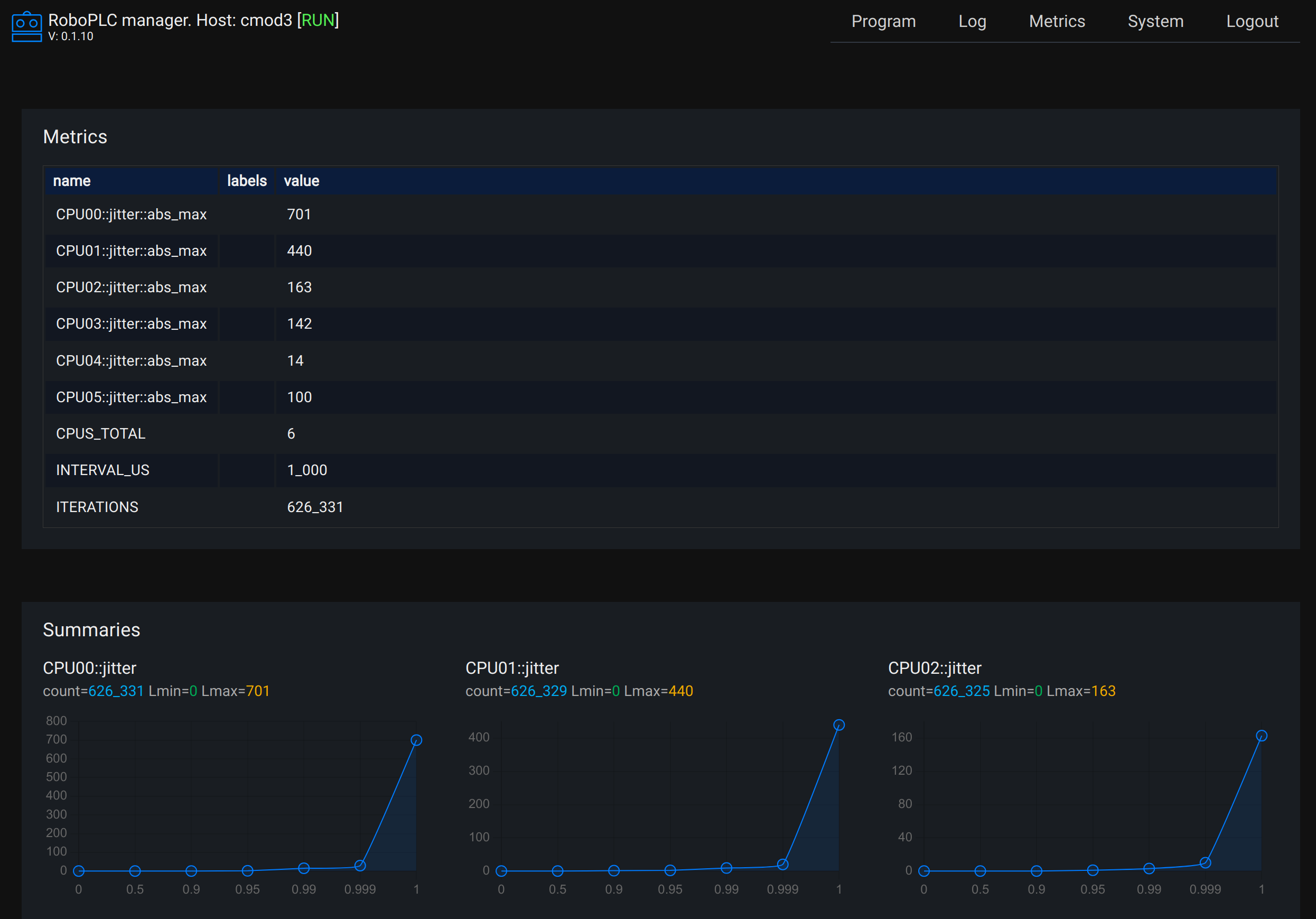
This tool measures jitters for each CPU core (difference between specified and real loop time) and provides a report.
Clone the repository to the local machine.
If RoboPLC Manager is installed on the target machine, the tool can be flashed with the following command (see Flashing):
robo flash(either edit robo.toml or use proper command-line arguments to specify the
destination). After flashing, the report can be viewed at RoboPLC Manager
Metrics page.
Install Rust and compile:
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
cargo build --releaseCopy the binary to the target machine and run it. The report can be obtained with
curl -s http://IP:9000and optionally connected to any Prometheus-compatible monitoring system.
By default, the program uses 1000us (1ms) loop interval. It can be changed with "INTERVAL" environment variable at compile-time:
INTERVAL=500 cargo build --release # for 500usIf using cross for cross-compilation, the variable must be set as a Docker option:
DOCKER_OPTS="-e INTERVAL=500" cross build --release(the provided script flash.sh can help with this as well).